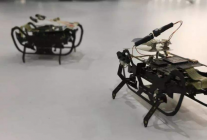
图源:佐治亚理工学院(Georgia Tech) 在为机器人设计移动系统时,通常都是设计一个单一的系统,能让机器人去执行需要完成的所有任务,不论是步行、跑步、翻滚、游泳或者是组合起来的动作都可以靠这一个移动系统完成。但是,人类根本不会这么做的,如果人类遵循机器人的这种方法,那我们就得穿着一种由运动鞋、登山鞋、溜冰鞋和脚蹼合在一起的怪异组合。相反,我们会很明智地根据不同的情况选择穿上不同的鞋子。 在机器人与自动化国际会议(ICRA)上,佐治亚理工学院的研究人员展示了这种换鞋的设想是怎么应用到机器人上的。
日期:2020-08-14