







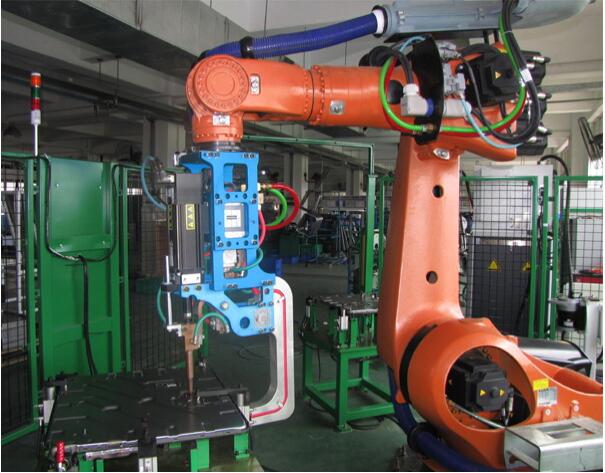

1、该机器人焊接系统采用德国KUKA公司KR150-2 独立关节型、6轴自由度弧焊机器人,重复定位精度±0.06mm,有效负截重量为150kg,运动最大半径2700mm。
2、阻焊电源配德国三相中频直流阻焊电源。加配BOSCH-Rexroth UIR功能板及BOS6000软件1套。
3、焊钳采用美资“韦孚”伺服电机一体式 “C”型焊钳。钳口深350mm,行程120mm。
4、采用日本三菱(MISUBISHI)PLC可编程控制器作为主控单元,PLC程序用梯形图方式编辑,并配有人机界面彩色触摸屏,对系统各外部动作进行可靠控制。
5、系统对应焊接工件为汽车座椅后背。








