Emmmm……No problem!说来就来,今天我们继续线上小课堂,开启新的章节,那就是“线性单元的配置”。
为了实操性更强些,我们就以“使用 KUKA KL-100 配置运动系统”作为示例来讲解。
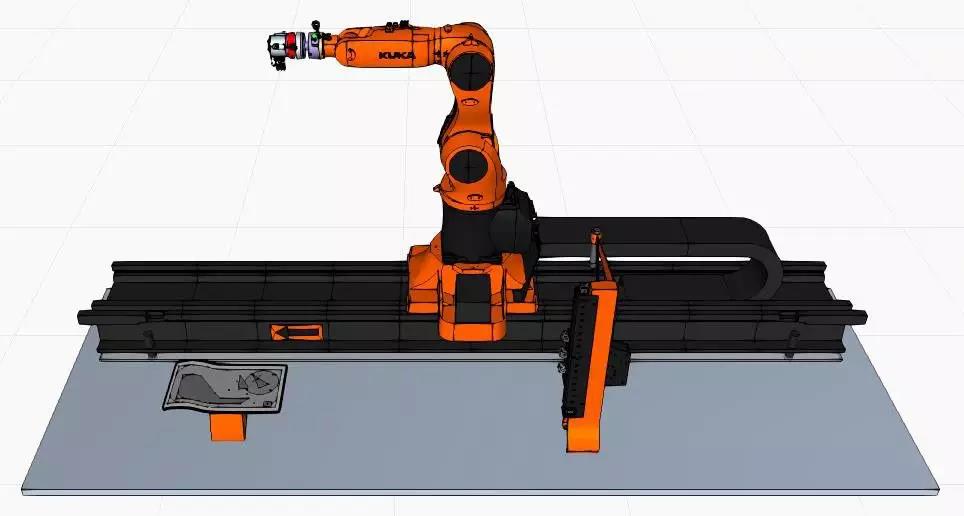
KUKA KL-100线性滑轨
KUKA 线性滑轨 KL 100 是一个安装在地面、天花板或墙壁上的独立单轴线性滑轨。在搬运、装卸、塑料加工、检测或检验等领域应用非常广泛。
KL 100 作为机器人的附加轴运行,适用于 KR AGILUS 系列的所有机器人。由此,控制就由相应的机器人控制器负责执行。
话不多说,赶紧干活~
配置目标
今天我们的目的是将 KR AGILUS 系列中的 KR 6 R700 sixx 机器人安装在 KUKA 的 KL-100 导轨上,配置 ROBROOT 运动系统后,可以使直线导轨和机器人实现同步控制。
怎么做?看这里!
使用WorkVisual配置线性单元,So easy↓↓↓
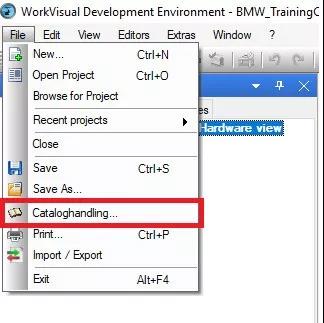
Step 1 点击文件→目录管理
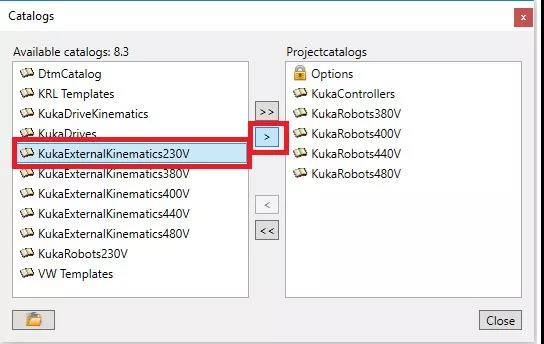
Step 2 选择KukaExternalKinematics230V 点击单个箭头,添加到现有目录
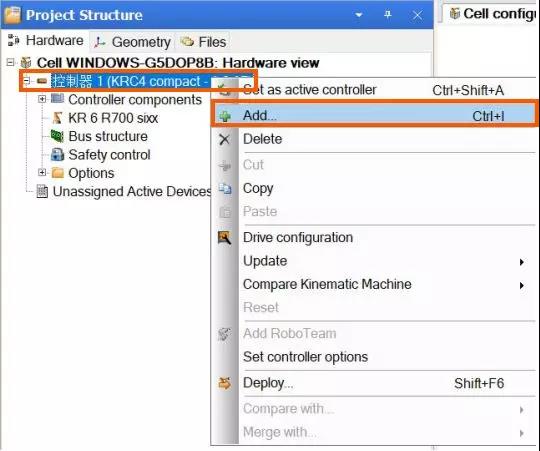
Step 3 右点击项目结构→添加
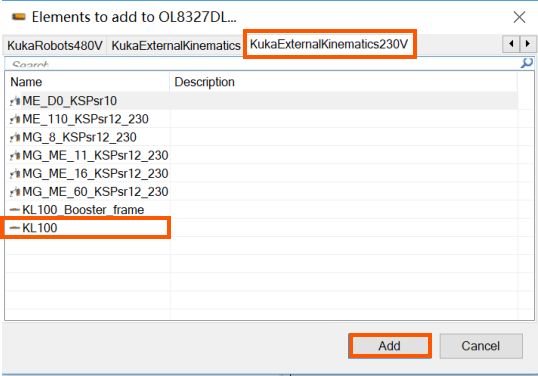
Step 4 选择KukaExternalKinematics230V → KL100 → Add
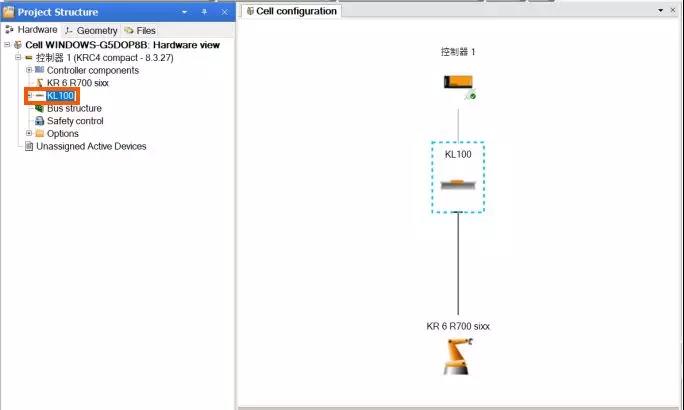
Step 5 KL100就添加进入项目结构
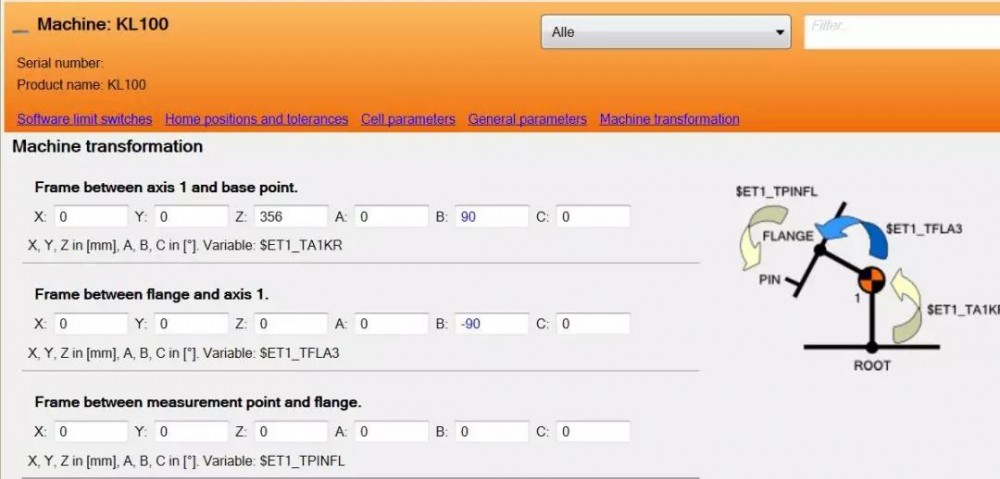
Step 6 将转换关系如右图填入KL100的参数里。
Step 7 再把项目下载到机器人控制柜。
是不是很简单,有木有get√到?好的,就酱~全部搞定!
如果你还有哪些不明白的地方可以猛戳下方评论,留言给小 KU 哦~!
顺便做下课程预告,下节课,我们将继续这个话题,解析“线性单元的Offset校准”,敬请期待~!